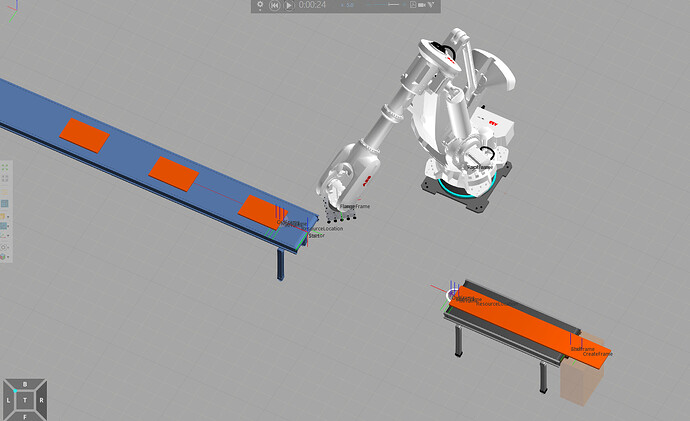
控制Delta机器人 - visual compents 疑难解答
1、获取对象:robot,conveyor
2、等待物料到达传感器位置
3、获取物料列,过滤filter已抓取的part
4、pop 一个物料
5、抓取物料,并将该物料放入已抓队列
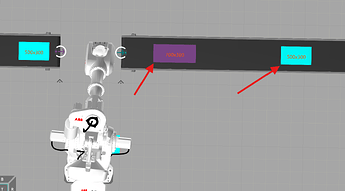
6、将抓取的物料放置到传输带
7、清除不在已抓取队列中的part
robot.GraspContainer:机器人夹具容器
Defines the Component Container behavior in the robot's flange node used to contain components grabbed by the robot.
在机器人用于连接机械爪容器的法兰连接件节点中定义组件容器行为
WorldPositionMatrix:得到节点在世界坐标系中的位置矩阵。
BoundDiagonal:Diagonal,对角Gets a half diagonal vector from the center to an upper corner of the container's bound box using positive axis directions.从绑定容器盒子的中心到右上角取得半对角线向量。

from vcScript import *
from vcHelpers.Robot2 import *
def OnRun():
app=getApplication()
robot=getRobot()
conveyor=app.findComponent("Sensor Conveyor")
picked=[]
#只要仿真器开着就一直运行
while app.Simulation.IsRunning==True:
#part 达到传感器
while robot.SignalMapIn.input(100)!=True:
delay(0.1)
#获得不是被抓的part
parts=conveyor.ChildComponents
for part in parts:
if part in picked:
parts.remove(part)
part=parts.pop()
#抓取part,将已抓取的part放置到picked列中
robot.pickMovingPart(part)
picked.append(part)
#计算相对传送带偏移的位置
part=robot.GraspContainer.Components[0]#robot 机械爪中的物件
pos=part.WorldPositionMatrix.P
a=conveyor.BoundDiagonal
offsetX=pos.X-a.X
#print('pos.X='+str(pos.X)+'pos.Y='+str(pos.Y)+'pos.z='+str(pos.Z))
#print('a.X='+str(a.X)+'a.Y='+str(a.Y)+'a.z='+str(a.Z))
#放置part
robot.place(conveyor,Tx=offsetX)
from vcScript import *
from vcHelpers.Robot2 import *
def OnRun():
app=getApplication()
robot=getRobot()
conveyor=app.findComponent("Sensor Conveyor")
picked=[]
#只要仿真器开着就一直运行
while app.Simulation.IsRunning==True:
#part 达到传感器
while robot.SignalMapIn.input(100)!=True:
delay(0.1)
#获得不是被抓的part
parts=filter(lambda x:x not in picked,conveyor.ChildComponents)
#parts=conveyor.ChildComponents
'''
for part in parts:
if part in picked:
parts.remove(part)
'''
part=parts.pop()
#抓取part,将已抓取的part放置到picked列中
robot.pickMovingPart(part)
picked.append(part)
#计算相对传送带偏移的位置
part=robot.GraspContainer.Components[0]#robot 机械爪中的物件
pos=part.WorldPositionMatrix.P
a=conveyor.BoundDiagonal
offsetX=pos.X-a.X
#print('pos.X='+str(pos.X)+'pos.Y='+str(pos.Y)+'pos.z='+str(pos.Z))
#print('a.X='+str(a.X)+'a.Y='+str(a.Y)+'a.z='+str(a.Z))
#放置part
robot.place(conveyor,Tx=offsetX)
picked=filter(lambda x:x in conveyor.ChildComponents,picked)#不知道这一句到底有没有用,删除掉好像也行,主要意思好像就是把picked不在 conveyor.ChildComponents排除掉
翻译由网淘巴完成,转载必须标明出处:https://www.wtao8.com/post/9.html

 微信扫一扫,打赏作者吧~
微信扫一扫,打赏作者吧~相关文章
-
Visual Components远程桌面问题解决指南:许可证限制与软件渲染设置 - General Questions - visual compents 疑难解答
远程桌面支持 一般问题 amlandis3 2021年6月11日 上午4:341 为什么我们不能在Visual Components中使用远程桌面?...
2026-04-21visual Component General Questions -
进程转换优先级详解:为何设置无效及容量拉动流程解决方案- Process Modeling - visual compents 疑难解答
hans 2026年4月10日 上午7:211 关于进程转换的问题优先级。请看以下案例:...
2026-04-21visual Component Process Modeling -
PartCreator插件教程:用Python在CAD中创建自定义文字组件与多语言支持 - Extensions and Python Add-ons - visual compents 疑难解答
PartCreator 扩展与Python插件...
2026-04-21visual Component Extensions and Python Add-ons -

.NET插件开发:如何访问ComponentAddedEventArgs中的组件属性并获取名称 - .Net Add-on Programming - visual compents 疑难解答
jurel 2025年11月5日 上午8:171 你好, 我还有一个...
2026-04-21visual Component .Net Add-on Programming -
RaycastSensor故障排除指南:原因分析与解决方案 - Process Modeling - visual compents 疑难解答
RaycastSensor 无法正常工作的常见原因及解决方案 1. 配置问题 传感器未启用:确保在代码或配置文件...
2026-04-21visual Component Process Modeling -
手动装配流程建模指南:如何正确模拟产品装箱与组装 - Process Modeling - visual compents 疑难解答
在手动流程中将产品装入容器作为装配 流程建模 中...
2026-04-21visual Component Process Modeling -

VC5.0 MBD自动生成机器人焊接程序实战指南 - Robot Programming - visual compents 疑难解答
我想请教一下,在VC5.0中如何使用MBD自动生成焊接程序。...
2026-04-21visual Component Robot Programming -
解决Python中vcMotionPath OnPhysicalTransition事件不触发问题 - Python Programming - visual compents 疑难解答
汉斯 2026年3月24日,下午2:301 我已在通用传送带上添加此脚本,用于监听产品被添加到传送带路径...
2026-04-21visual Component Python Programming -
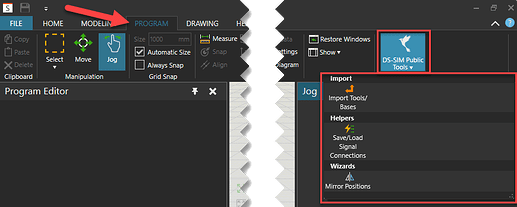
提升KUKA机器人仿真效率:DS-SIM公共工具扩展与Python插件详解 - Extensions and Python Add-ons - visual compents 疑难解答
mastu 2023年5月10日,下午2:261 如果您在 KUKA.Sim(插件)或 KUKA OLP...
2026-04-21visual Component Extensions and Python Add-ons