
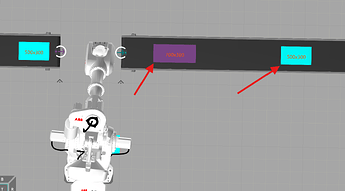
hi guys, i’m currently programming the gripper following the steps of the turorial. The gripper closes but After that it does‘nt pick up/ Lift the component. Maybe some of you know what the Problem is. Trank you very much for your help!
嗨,大家好,我现在正在按照教程的步骤来编程抓取器。夹持器关闭,但之后就不能提起组件了。也许你们中的一些人知道问题是什么。感谢您的帮助!

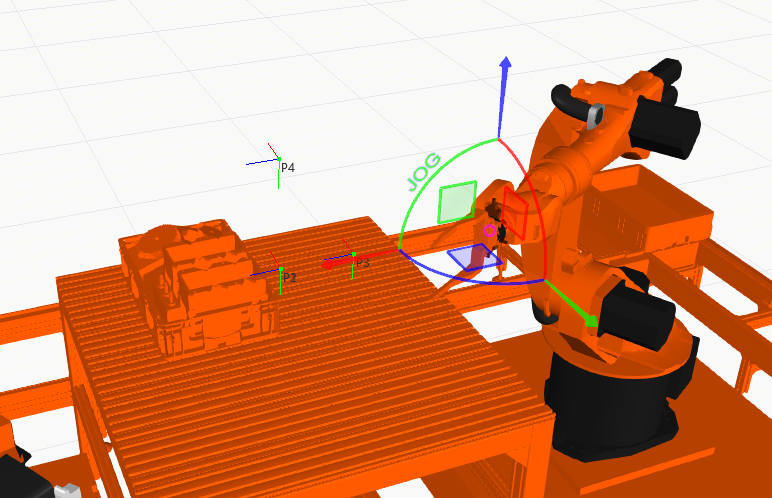
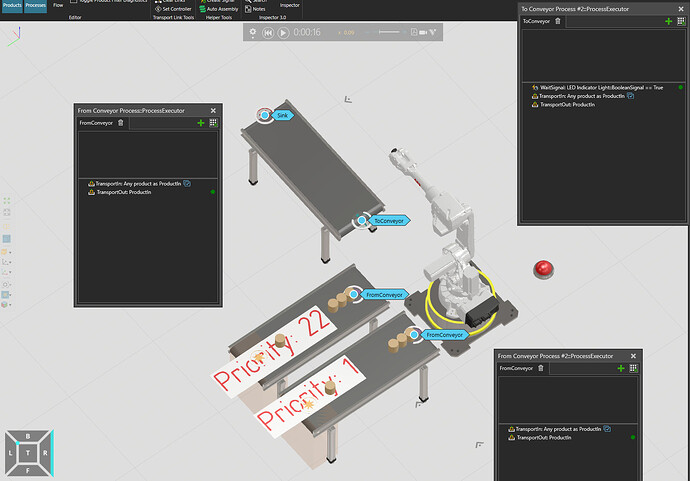
Unbenannt2.PNG806×425 106 KB
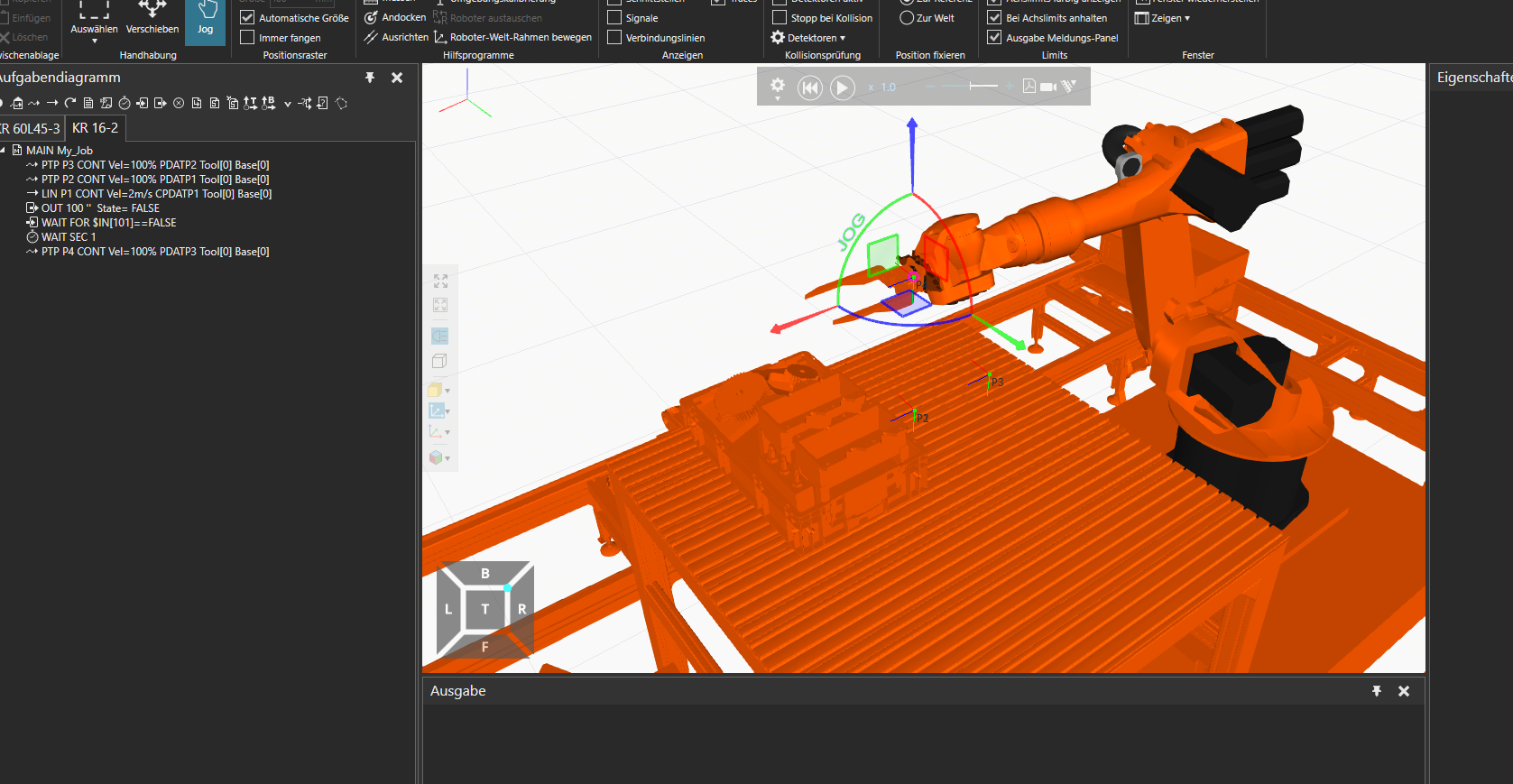
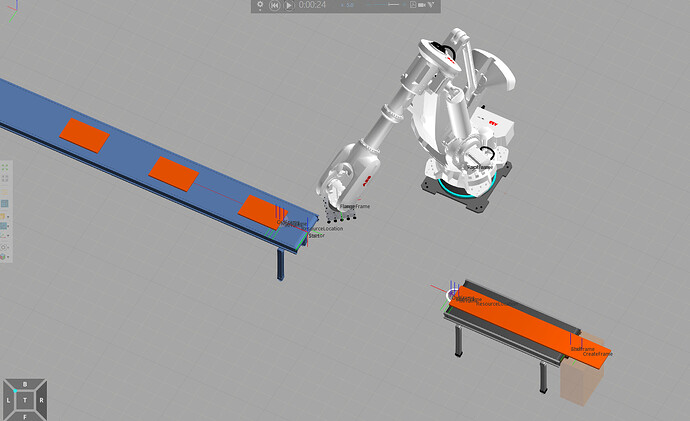
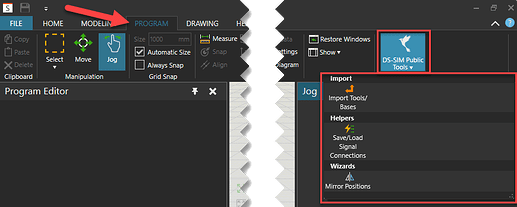
Unbenannt31677×869 286 KB
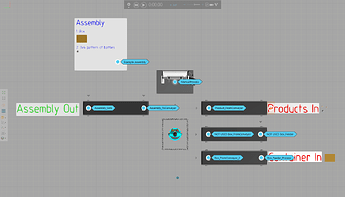
Unbenannt1772×498 137 KB

 微信扫一扫,打赏作者吧~
微信扫一扫,打赏作者吧~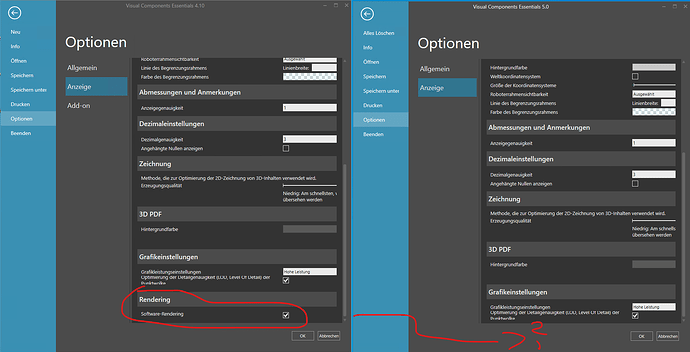



{kind=link}