大家好,
我正在设计一套穿梭车输送系统,需要一些关于实现控制逻辑的指导。
我的需求如下:
-
当满托盘处理完成后,穿梭车应先拾取一个空托盘
-
然后穿梭车应移动到机器人工作站,在此它将:
-
取走满载托盘
-
同时放下空托盘(在机器人工作站进行托盘交换)
-
-
交换完成后,穿梭车应将整托货物运送至下料口/出料端
-
此循环应持续重复运行
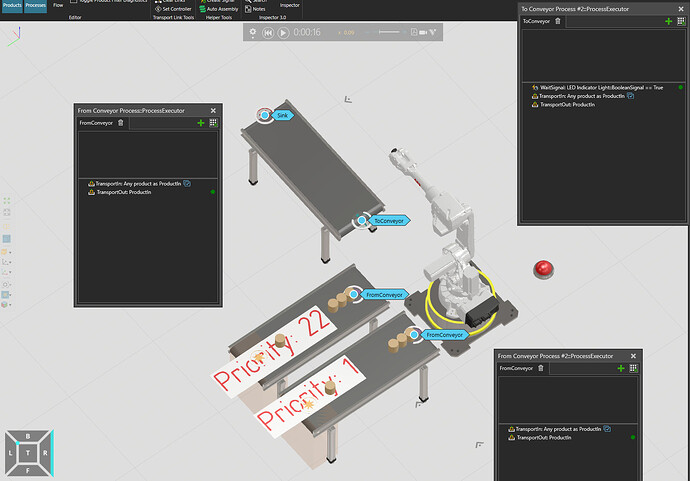
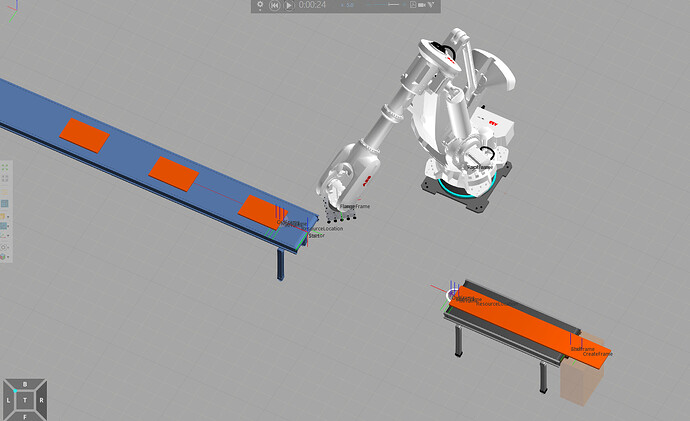
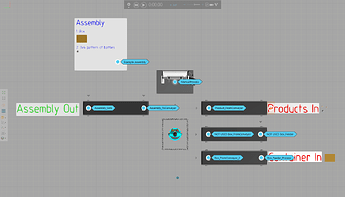
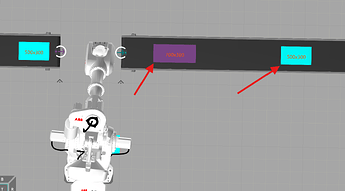
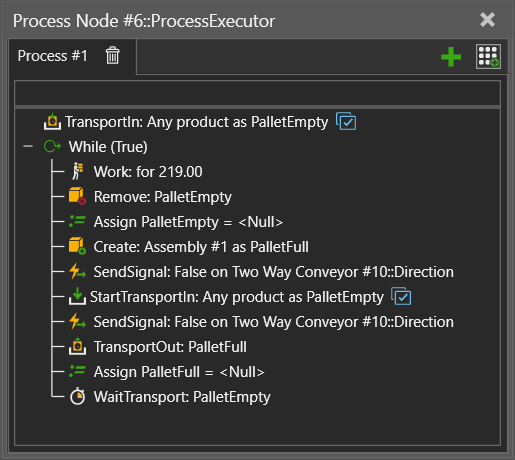
我已附上穿梭车布局图供参考
穿梭车二号输送机组装图 - 2.VCMX(2.3 MB)
请提供建议:
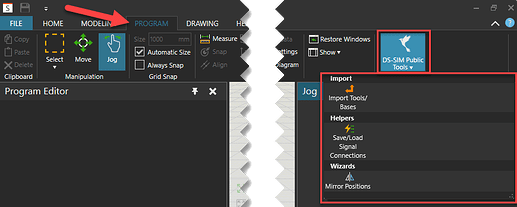
- 在控制程序/脚本或工艺流程中实现此逻辑的最佳方式是什么? **建议方案:** 1. **状态机控制逻辑** - 设计“空闲→取货→运输→卸货→返回”循环状态 - 通过传感器检测托盘位置与设备状态 - 使用互锁机制避免冲突 2. **PLC编程实现**(若采用工业控制器) ```structured text CASE current_state OF IDLE: IF pallet_detected THEN current_state := LOAD; LOAD: IF pallet_secured THEN current_state := TRANSPORT; TRANSPORT: IF at_sink_position THEN current_state := UNLOAD; // ... 后续状态循环 END_CASE ``` 3. **异常处理机制** - 添加超时监控与故障恢复程序 - 设置急停与手动干预接口 4. **可视化监控** - 在SCADA界面显示实时状态与循环计数 - 记录运行日志用于维护分析 需结合具体设备型号(如穿梭车控制系统是否支持高级脚本)进一步细化实施方案。
提前感谢您的支持!

 微信扫一扫,打赏作者吧~
微信扫一扫,打赏作者吧~