如果您在 KUKA.Sim(插件)或 KUKA OLP 中使用 KUKA 机器人,此 Python 插件提供了一些功能,可简化您的工作:
-
导入 $config.dat 文件属性(基座/基座名称、工具/工具名称、负载数据)
-
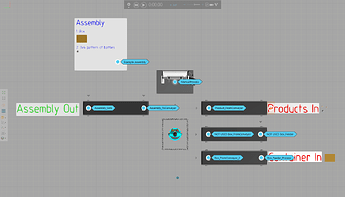
保存和加载机器人的信号连接(例如,需要手动更换机器人时)
-
镜像位置语句(适用于镜像零件等)
-
通过相对偏移或绝对值为可选择的语句参数(坐标、外部轴值等)调整位置语句
-
调整选定语句的工具或基座,而不改变这些语句中的机器人姿态
-
为组件添加输入。连接布尔信号到此输入,可在仿真运行时显示或隐藏组件
安装插件:下载下方的 zip 文件,解压包后将文件夹“kuka_sim_extensions”复制到仿真软件的 MyCommands 文件夹中。MyCommands 文件夹通常位于您的个人文档文件夹中。
示例:
C:\Users\%用户名%\OneDrive - KUKA AG\Documents\KUKA\KUKA.Sim 4.10\My Commands\Python 2
(请注意:由于语言设置,您系统上的路径可能略有不同!)
kuka_sim_extensions_V3.1_2025-03-27.zip(1.6 MB)
您可以在 visual Components Academy 中找到关于插件及其安装方法的更详细信息。
更新记录
2023-10-27 更新:
- 新版本 V1.1
- 更改了插件的文件夹结构
- 修复了保存/加载信号连接中的一些问题
-
新增功能
-
助手/调整语句
→ 选择多个语句并调整这些语句的各种参数,例如外部轴的绝对值或坐标的相对偏移量
-
助手/调整语句
注意:
-
保存/加载信号连接中似乎仍存在其他问题
__
2023-11-03 更新:
- 新版本 V1.2
-
修复了保存/加载信号连接中的错误
__
2024-06-17 更新:
- 新版本 V1.3
-
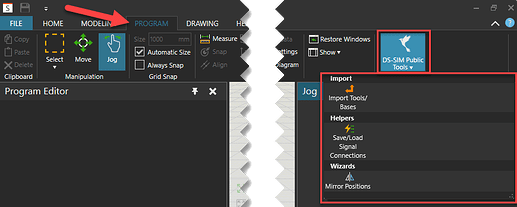
导入工具/基座(路径:程序 / DS-SIM 公共工具 / 导入)
→ 增强了对 config.dat 中关于 HOME 位置的各种语法的支持 -
新增功能
-
更改工具/基坐标系(编程 / DS-SIM 公共工具 / 辅助工具)
→ 在不改变所选语句中机器人姿态的情况下,调整所有选定语句的工具或基坐标系 -
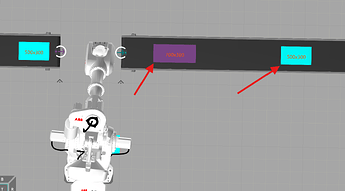
通过信号显示/隐藏组件(建模 / DS-SIM 公共工具 / 向导工具)
→ 为组件添加一个输入接口。在仿真运行时,连接一个布尔信号到此输入接口,以显示或隐藏该组件
__
-
更改工具/基坐标系(编程 / DS-SIM 公共工具 / 辅助工具)
编辑于 2024年10月8日:
- 新版本 V2.0
- 将软件包名称更改为 kuka_sim_extensions
-
调整了软件包结构
→ 因此,必须确保我的命令中使用的文件夹名称为“kuka_sim_extensions” - 使用此版本前,需删除此附加组件的旧版本
-
新增功能
-
可见性助手(建模 / DS-SIM 公共工具 / 向导工具)
→ 为不可见特征添加后缀标记(必要时也可删除后缀)
→ 一键设置所有标记特征为可见或不可见
→ 强制组件所有可用特征为不可见或可见
-
可见性助手(建模 / DS-SIM 公共工具 / 向导工具)
已知问题
-
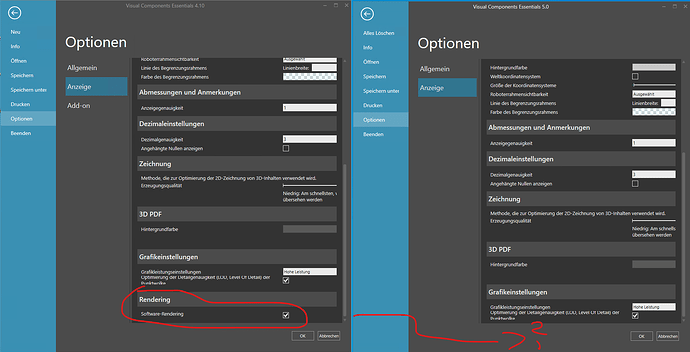
在 VC 4.9.2 中使用此功能需要采取临时解决方案
KUKA.Sim / KUKA OLP - DS-SIM 公共工具 - #19 作者:mastu -
KUKA.Sim 和 VC 的德语本地化存在错误
→ 建议将软件语言设置为英语以使用此插件!
编辑于 2025-03-05:
- 新版本 V3.0 → 兼容 Sim 4.10(预计仍适用于 Sim 4.3)
-
请务必将软件包粘贴到 “Python 2” 子文件夹中(该文件夹为 Sim 4.10 新增)
例如:C:\Users\%username%\OneDrive - KUKA AG\Documents\KUKA\KUKA.Sim 4.10\My Commands\Python 2 - 功能与之前相同,并修复了一些小错误
编辑于 2025-03-27:
-
新版本 V3.1
→ 助手 / 保存/加载信号连接现在支持布尔映射连接



 微信扫一扫,打赏作者吧~
微信扫一扫,打赏作者吧~