我目前正在撰写学士论文,尝试为我们大学拥有的Festo CP工厂实现一个简单的数字孪生系统。
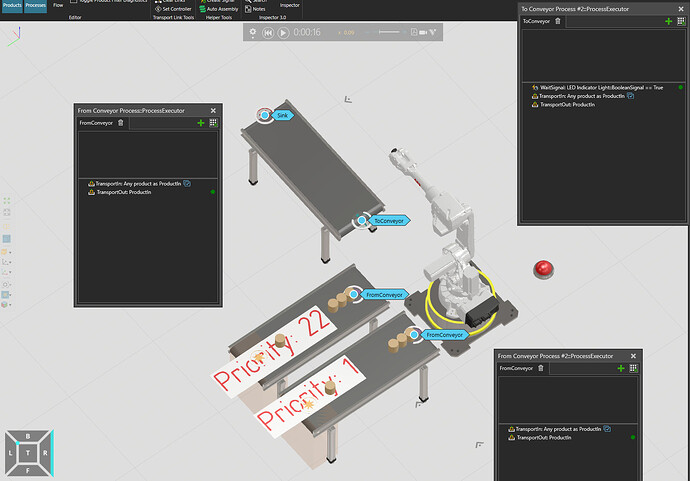
传送带和挡块(金色/黄色部件,您可以看到载具在因连接器再次停止前会在该处停下)通过OPC UA获取其启动/释放信息。随后,当现实中的载具触碰到传感器时,传送带会收到激活信号,或挡块收到释放信号。
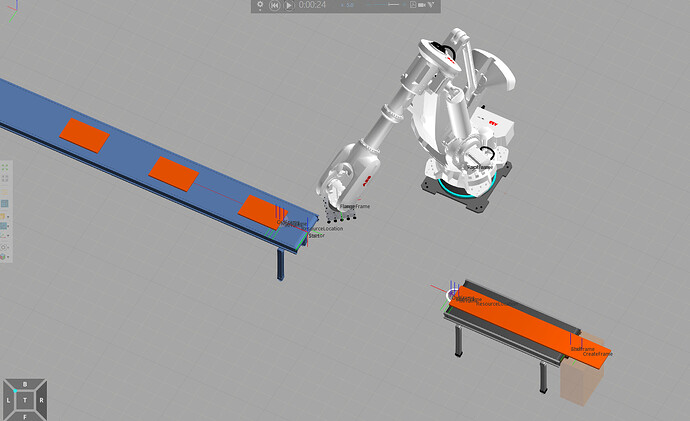
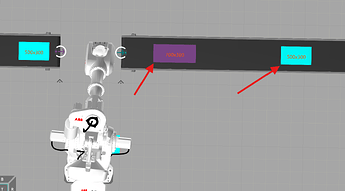
因此,我面临的问题是:载具在实际连接器(两条传送带之间的转移点)之前很远就停下了。随着模拟运行时间的推移,这段距离还在不断增加。您可以在附带的视频中看到我的意思(我只用手机录制了视频,因为大学电脑上没有录屏软件),您看到的第一次在挡块(金色/黄色物体)处的停止,是载具在等待现实中的对应物也离开挡块。
我尝试将转移点移动到其他位置,但这完全没有效果。只是改变了停止的位置。我还尝试通过Python建立连接,但也没有任何改变。
我真的卡在这里,不知道如何修复这个问题。任何帮助都将不胜感激!
数字孪生传送带转移故障诊断:载具提前停止问题解析 - General Questions - visual compents 疑难解答
2026-04-21
新闻来源:网淘吧
围观:145
电脑广告
手机广告
所以你是使用了组件路径传感器行为,然后将其信号发送到OPC UA服务器吗?这些传感器基于组件在运动路径上的边界框进行工作,你可以选择触发点。
如果传感器在奇怪的位置触发,那么你的组件很可能有一个奇怪或意料之外的边界框。尝试移除不必要的框架,并检查所有其他可能影响组件边界的特征。
我使用OPC UA服务器来接收实际传送带是否移动的信号,并且没有使用任何组件路径传感器。我通过Python脚本将"载具"放置在传送带上,然后根据服务器传来的信号控制路径的开启与关闭。传送带之间采用一对一接口连接,以便在即插即用功能中使用。载具并非停在我放置接口的传送带末端或路径终点,而是会提前停止。

所以你在VC中完全没有安装任何传感器,以便在零件到达时触发传送带停止吗?
我怀疑您实际传送带的速度可能与仿真中的不一致。比如,实际传送带是否会有加减速过程,而仿真路径只是瞬间启停?
我认为这种同步永远无法做到完美,除非您采取一些措施,比如从实际传送带读取编码器数值,然后通过 VC 脚本计算并相应更新部件位置。在这种情况下,我认为基本上无法使用 VC 的运动路径,因为它们无法基于“行进距离”驱动,只能基于仿真时间。
实际传送带以恒定速度运行,只有在物体离开传送带几秒后才会停止,当载具再次上传送带时又会以恒定速度启动。
而且我没有任何传感器来激活路径,所有操作都通过服务器完成。目前使用阻挡器作为同步点,我让 VC 中的载具运行得稍快一些,使其始终领先于实际载具,然后在阻挡器处等待实际载具到达并释放阻挡器。但这样带来的问题是,我的载具不会在传送带末端(即路径终点)停止,而是提前停止。仿真运行时间越长,载具在路径上停止的位置就越靠前。因此,经过一次循环后,载具会在当前路径的中途停止,即使该路径处于激活状态,并且等待下一条路径激活,但此时载具甚至还没有接近当前路径的终点或连接器。如图所示,我希望载具在传送带末端停止,并在那里等待下一条路径激活,但目前无法实现。
另外,我其实很希望能更新部件的位置,但可惜没想明白如何在模拟运行时改变物体的位置。

嗨,Aaron
希望你的本科毕业一切顺利
我很喜欢你复刻的Festo CP工厂模型,不知道能否分享这个模型?
祝好
Helge Grøn
丹麦奥尔堡UCN大学
你好Helge,
首先感谢你关心我的本科情况,一切顺利,我现在已经在攻读硕士学位了。
关于Festo模型,很遗憾我无法分享,因为我使用了Festo官方的CAD模型,按规定我们不能传播这些模型,而且这需要与Festo公司协商。
此致
Aaron Broel
德国科特布斯勃兰登堡工业大学

 微信扫一扫,打赏作者吧~
微信扫一扫,打赏作者吧~文章底部电脑广告
手机广告位-内容正文底部
相关文章
-
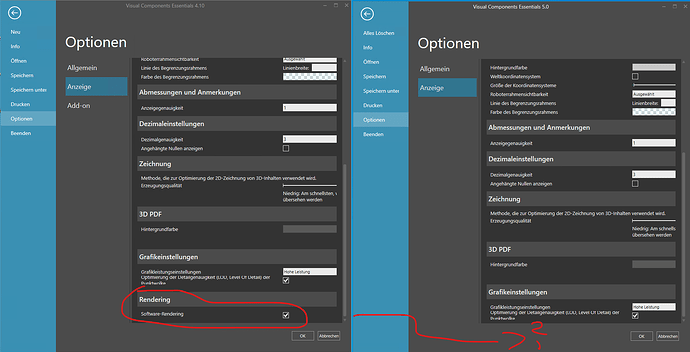
Visual Components远程桌面问题解决指南:许可证限制与软件渲染设置 - General Questions - visual compents 疑难解答
远程桌面支持 一般问题 amlandis3 2021年6月11日 上午4:341 为什么我们不能在Visual Components中使用远程桌面?...
2026-04-21visual Component General Questions -
进程转换优先级详解:为何设置无效及容量拉动流程解决方案- Process Modeling - visual compents 疑难解答
hans 2026年4月10日 上午7:211 关于进程转换的问题优先级。请看以下案例:...
2026-04-21visual Component Process Modeling -
PartCreator插件教程:用Python在CAD中创建自定义文字组件与多语言支持 - Extensions and Python Add-ons - visual compents 疑难解答
PartCreator 扩展与Python插件...
2026-04-21visual Component Extensions and Python Add-ons -

.NET插件开发:如何访问ComponentAddedEventArgs中的组件属性并获取名称 - .Net Add-on Programming - visual compents 疑难解答
jurel 2025年11月5日 上午8:171 你好, 我还有一个...
2026-04-21visual Component .Net Add-on Programming -
RaycastSensor故障排除指南:原因分析与解决方案 - Process Modeling - visual compents 疑难解答
RaycastSensor 无法正常工作的常见原因及解决方案 1. 配置问题 传感器未启用:确保在代码或配置文件...
2026-04-21visual Component Process Modeling -
手动装配流程建模指南:如何正确模拟产品装箱与组装 - Process Modeling - visual compents 疑难解答
在手动流程中将产品装入容器作为装配 流程建模 中...
2026-04-21visual Component Process Modeling -

VC5.0 MBD自动生成机器人焊接程序实战指南 - Robot Programming - visual compents 疑难解答
我想请教一下,在VC5.0中如何使用MBD自动生成焊接程序。...
2026-04-21visual Component Robot Programming -
解决Python中vcMotionPath OnPhysicalTransition事件不触发问题 - Python Programming - visual compents 疑难解答
汉斯 2026年3月24日,下午2:301 我已在通用传送带上添加此脚本,用于监听产品被添加到传送带路径...
2026-04-21visual Component Python Programming -
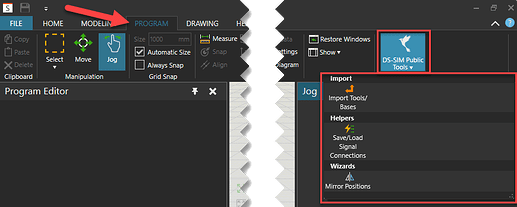
提升KUKA机器人仿真效率:DS-SIM公共工具扩展与Python插件详解 - Extensions and Python Add-ons - visual compents 疑难解答
mastu 2023年5月10日,下午2:261 如果您在 KUKA.Sim(插件)或 KUKA OLP...
2026-04-21visual Component Extensions and Python Add-ons