大家好,
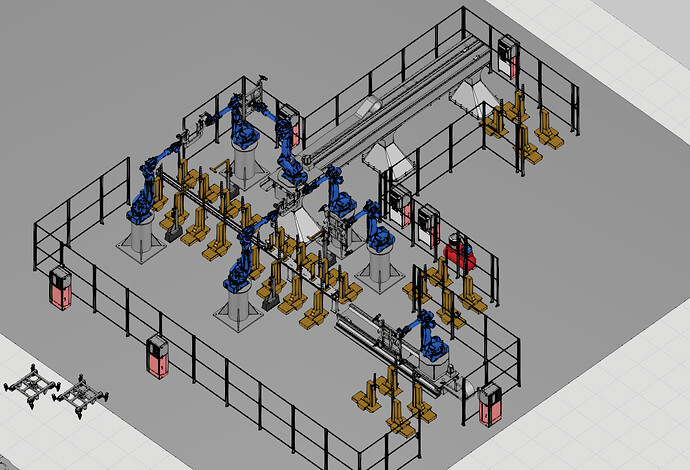
我是一名正在完成学士学位论文项目(布加勒斯特理工大学,工业工程与机器人学院)的学生。我的目标是基于实际参考案例,重建一个复杂的白车身焊接单元仿真。
背景:我正在根据以下视频重建该单元:https://www.youtube.com/watch?v=48m_RvzMCcM
面临的挑战:我已成功导入并配置了自定义的CAD几何体(机器人第七轴、定制线性导轨、定制升降台/定位器)。然而,在工艺流程建模阶段完全陷入了困境。我不理解如何让我自定义导入的几何体与工艺流程协同工作。我不想用标准电子目录组件(如通用传送带或送料器)替换我的模型,因为我需要保留设计中的特定组件。
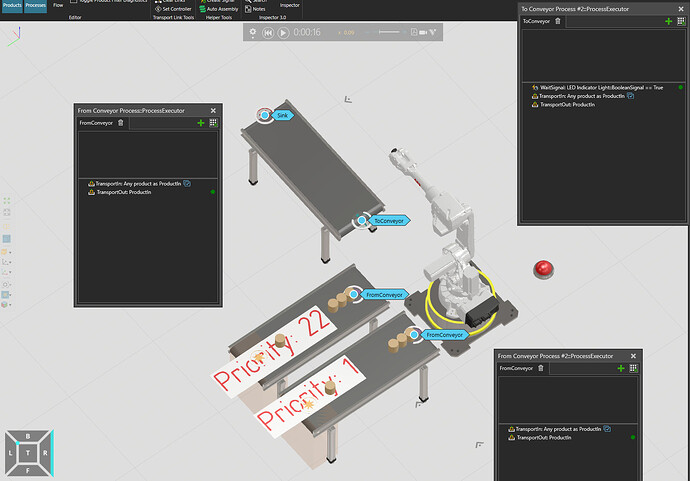
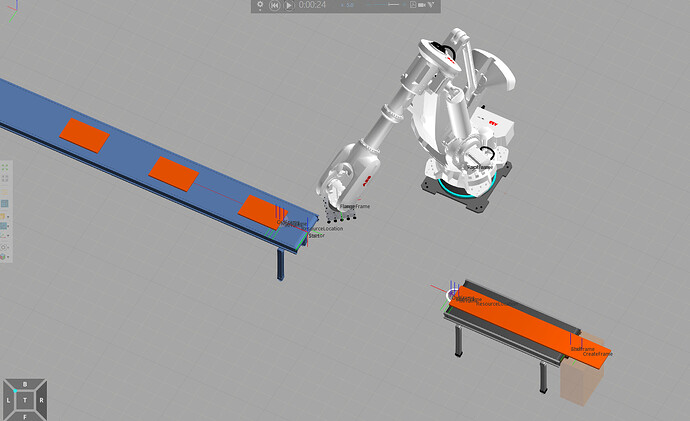
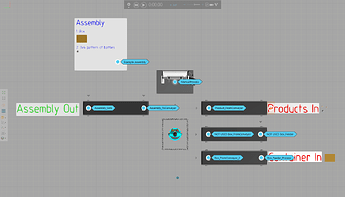
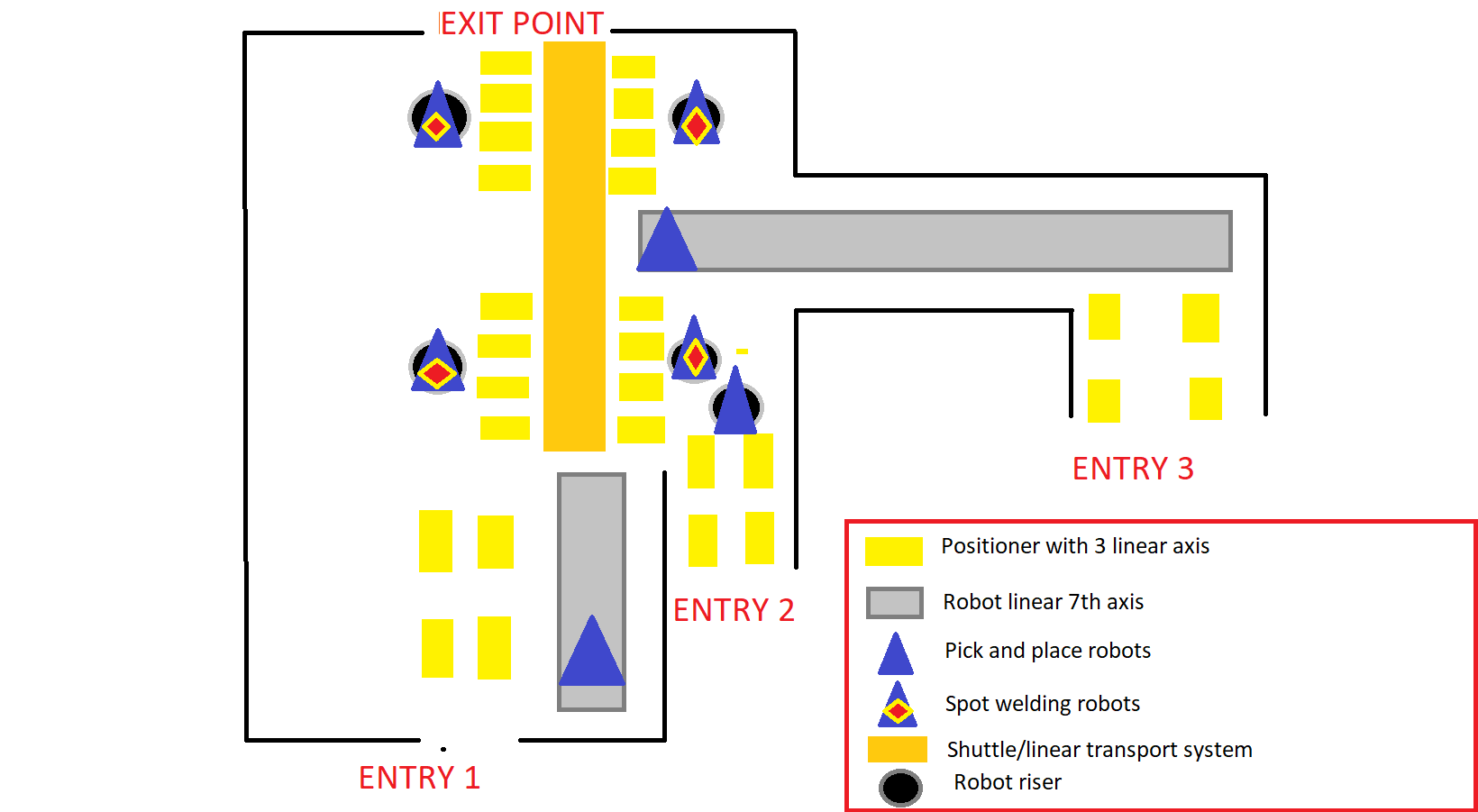
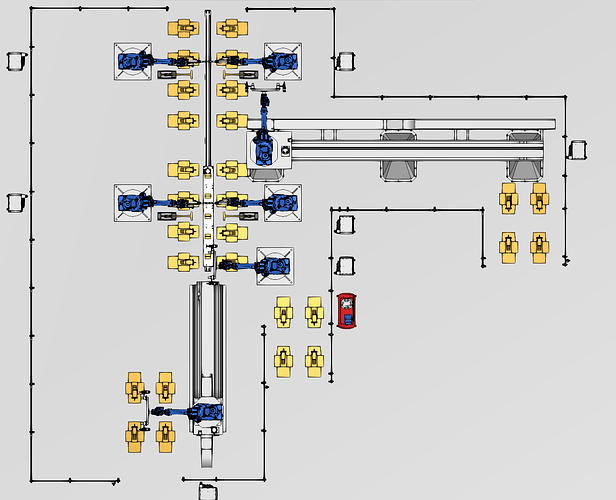
我的布局与工作流程(详见附图):
-
输入/输出:设有3个独立的白车身零件入口点,1个出口点。
-
处理:3台搬运机器人从4个线性定位器上拾取零件,并将其放置到中央输送线上。
-
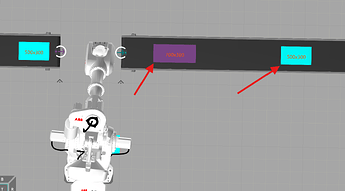
工序站1(提升与焊接):
-
一组4个同步的线性定位器(定制建模)必须接收零件。
-
逻辑:它们提升组件 → 点焊机器人进行焊接 → 它们将组件降下至中央穿梭车上。
-
-
输送: 定制线性轨道(穿梭车)将组件输送至下一区域。
-
工序站2:
- 另一组4个定位器将零件从穿梭车上提升 → 进行更多焊接 → 将其降回原处。
-
出口:穿梭车移至出口。
我的问题:
-
自定义几何体作为工序节点:由于我未使用电子目录零件,为了使我的自定义CAD被工序流程识别,我绝对需要为其添加哪些行为(输送节点、工序执行器等)?
-
“四足”工作站:我如何将4个独立的定位器视为单个逻辑工作站进行模拟?我需要零件放置在全部4个定位器上,但在逻辑上作为一个单元进行处理。
-
复杂序列:如何编程转移 → 提升 → 焊接 → 下降 → 转移流程建模中的顺序? 在流程建模中,“顺序”通常指的是活动、任务或事件按特定次序发生的逻辑关系。它定义了流程中各个步骤的先后执行顺序,是流程模型(如流程图、BPMN图等)的核心元素之一。顺序可以通过箭头、连线或符号表示,确保流程的逻辑性和可执行性。
我已将当前布局的截图附在下方。
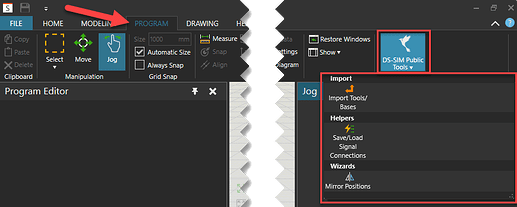
对于完全自定义几何体设置 Process Flow(流程模拟),以下是一些指导、教程和示例资源: ### 1. **官方文档与指南** - **Ansys Fluent User's Guide**:查看 "Process Flow" 或 "Custom Geometry" 相关章节,通常包含基础设置步骤。 - **Ansys Learning Hub**:提供官方培训课程,涵盖自定义几何体的流程模拟设置。 ### 2. **关键步骤概述** - **几何准备**:在 CAD 软件中创建几何模型,确保封闭且无错误,导出为 STEP 或 IGES 格式。 - **网格生成**:使用 Fluent Meshing 或 ANSYS Meshing 划分高质量网格,注意边界层和关键区域细化。 - **Process Flow 设置**: - 在 Fluent 中启用 "Process Flow" 模块。 - 定义自定义几何的入口、出口、壁面等边界条件。 - 设置物理模型(如多相流、化学反应)。 - 配置求解器参数(如迭代步数、收敛标准)。 - **后处理**:使用 CFD-Post 或 Fluent 内置工具分析结果。 ### 3. **教程与示例** - **Ansys Fluent Tutorials**:官网或安装包内置教程,搜索 "custom geometry process flow" 相关案例。 - **YouTube 频道**:Ansys 官方频道或专业 CFD 频道常有实操演示。 - **论坛与社区**: - **Ansys Learning Forum**:用户分享的案例和问题解答。 - **CFD Online**:搜索 "Fluent process flow custom geometry" 获取经验分享。 ### 4. **注意事项** - 确保几何复杂度与网格质量平衡,避免计算资源浪费。 - 验证边界条件设置是否符合实际物理过程。 - 使用参数化研究优化流程设计。 ### 5. **进阶资源** - **Ansys Customization Tools**:如 UDF(用户自定义函数)或 Scheme 脚本,用于高度定制化流程。 - **学术论文与案例研究**:参考相关领域文献中的模拟方法。 如需具体操作示例,建议结合软件版本查找对应教程,或提供更多细节以获取针对性指导。
这对我的毕业设计将非常有帮助。
提前感谢!
MANIPULATION SOLDERING CELL BiW GP225.vcmx(11.0 MB)

 微信扫一扫,打赏作者吧~
微信扫一扫,打赏作者吧~