你好,
在OLP中,是否可以更改焊接语句内各点的名称?我尝试使用“设置点名称”功能,但它只对路径外的点有效。
你好,
在OLP中,是否可以更改焊接语句内各点的名称?我尝试使用“设置点名称”功能,但它只对路径外的点有效。
早上好!
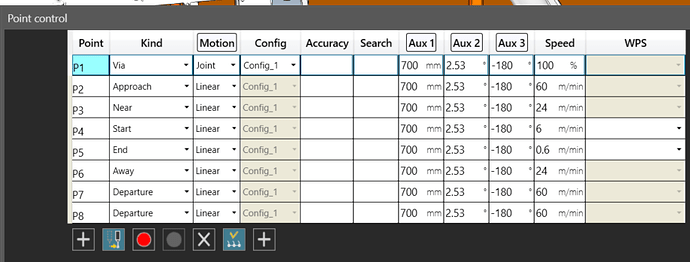
实际上,如果你提到“Via”、“Approach”……这些是点的ID,获取焊接语句的句柄后,你可以通过Positions找到包含这些点的列表。类似地:
from vcScript import *
def OnSignal( signal ):
pass
def OnRun():
pass
comp = getComponent()
exe = comp.findBehaviour('Executor')
program = exe.Program
rou = program.MainRoutine
num = 0
for i in rou.Statements[0].Positions:
i.Id = str(num)
print i.Id
num+=1
我在这里做的是将名称改为数字,你也可以读取csv文件来重命名它们。
你好,我是BAD。 有什么可以帮你的吗?
我理解您希望将焊接语句中的点名称(如 P1、P2 等)更改为更具描述性的名称(如 pStart、pEnd),以便在后续处理程序时能反映这些名称。对于普通的 PTP 和 LIN 语句,您已经成功使用了“Set Point Names”命令,但焊接语句的点名称更改遇到了困难。 针对焊接语句的点名称修改,您可以尝试以下几种方法: 1. **检查机器人控制器或编程软件的特定功能**: - 某些机器人系统(如 KUKA、ABB、FANUC 等)可能有专门的焊接功能模块或命令,用于定义焊接路径的点名称。请查阅您的机器人编程手册,寻找与焊接相关的点命名或标签设置选项。 2. **使用变量或别名功能**: - 如果直接修改焊接语句的点名称不可行,可以尝试在程序中定义变量或别名,将 P1、P2 等点赋值给这些变量,然后在焊接语句中使用这些变量。例如: ``` pStart = P1 pEnd = P2 Welding pStart, pEnd ``` - 这样,在后续处理时,您可以通过变量名来引用这些点。 3. **后处理脚本或自定义宏**: - 如果您的编程环境支持,可以编写后处理脚本或自定义宏,在生成最终程序文件时自动将点名称替换为所需的名称。这通常需要一定的编程知识,但可以灵活地处理各种语句类型。 4. **联系技术支持或查阅社区资源**: - 如果您使用的机器人系统有官方技术支持,可以咨询他们是否有针对焊接语句点名称更改的解决方案。此外,相关的用户论坛或社区也可能有类似问题的讨论。 5. **考虑程序结构优化**: - 如果以上方法均不可行,您可以考虑调整程序结构,将焊接路径的点定义为独立的点或位置变量,并在焊接语句中引用这些变量,以确保名称的一致性。 希望这些建议能帮助您解决焊接语句点名称更改的问题。如果您能提供更多关于您使用的机器人系统或编程环境的信息,我可以给出更具体的指导。
是的,你说得对。 在 `vcPositionStatement` 中,`.Positions` 是一个属性,用于表示与某个验证凭证(Verifiable Credential)相关的职位或立场声明。 通常,它可能包含一个或多个描述职位、角色或立场的条目。 简单来说: - **`vcPositionStatement`** 是一种凭证类型,用于证明某人的职位或立场。 - **`.Positions`** 是该凭证中的一个具体属性,存储实际的职位信息。 如果你有具体的代码或结构示例,可以进一步解释!
嗨,Gomes!
很抱歉我无法在短时间内用VC进行尝试,因为我现在不在工作时间。但我很确定,除了通过后处理编译文件外,我无法用Python API读取这个Name属性(至少到目前为止我还没有成功)。
如果是我来处理的话,我会尝试修改后处理编译文件的内容,让输出的Name指向ID。或者更复杂一点,我会编写一个迭代程序来自己获取cPoint(如果你看过那个后处理编译文件,就知道我在说什么),然后用你自己的属性来完成后续工作。
"Positions" 确实是 vcPositionStatement 的一个属性,它指向焊接语句内部的点位。
基于上述原因,可能需要您自行尝试,祝您进展顺利!
(备注:对了,我隐约记得那些点位的属性中涉及“P1”和“P2”。但不太确定记忆是否准确,祝您好运!)
我尝试确认之前关于可以通过属性影响最终输出名称的说法是错误的(当然,我一开始就不确定这个记忆点是否正确)。不过,通过查看机器人后处理器,我发现最终输出名称(cPoint.Name)其实是一个复合变量,由父语句名称加上“_”和序列号组成。这意味着,如果想要更改最终名称,最好先修改机器人后处理器的内容来实现。
远程桌面支持 一般问题 amlandis3 2021年6月11日 上午4:341 为什么我们不能在Visual Components中使用远程桌面?...
2026-04-21visual Component General Questions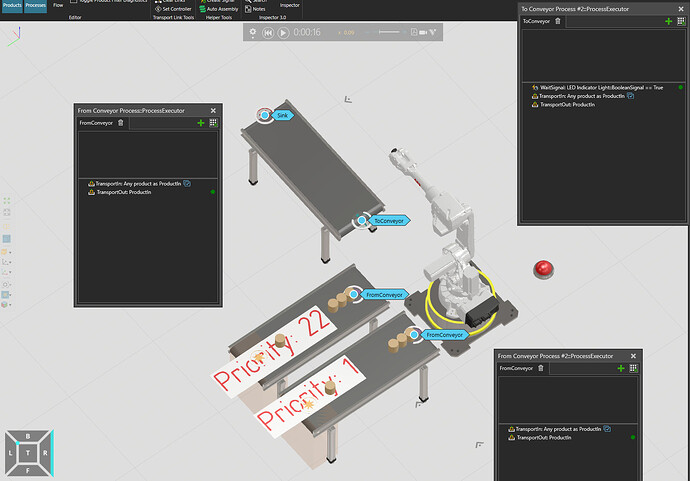
hans 2026年4月10日 上午7:211 关于进程转换的问题优先级。请看以下案例:...
2026-04-21visual Component Process Modeling
PartCreator 扩展与Python插件...
2026-04-21visual Component Extensions and Python Add-ons
jurel 2025年11月5日 上午8:171 你好, 我还有一个...
2026-04-21visual Component .Net Add-on Programming
RaycastSensor 无法正常工作的常见原因及解决方案 1. 配置问题 传感器未启用:确保在代码或配置文件...
2026-04-21visual Component Process Modeling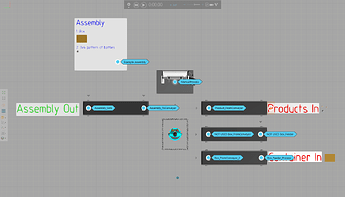
在手动流程中将产品装入容器作为装配 流程建模 中...
2026-04-21visual Component Process Modeling
我想请教一下,在VC5.0中如何使用MBD自动生成焊接程序。...
2026-04-21visual Component Robot Programming
汉斯 2026年3月24日,下午2:301 我已在通用传送带上添加此脚本,用于监听产品被添加到传送带路径...
2026-04-21visual Component Python Programming
mastu 2023年5月10日,下午2:261 如果您在 KUKA.Sim(插件)或 KUKA OLP...
2026-04-21visual Component Extensions and Python Add-ons
上网淘巴领天猫淘宝优惠券,一年省好几千。
广告 ×您是本站第1487224名访客 今日有0篇新文章/评论

 微信扫一扫,打赏作者吧~
微信扫一扫,打赏作者吧~