BAD January 13, 2026, 1:17am1
大家好!
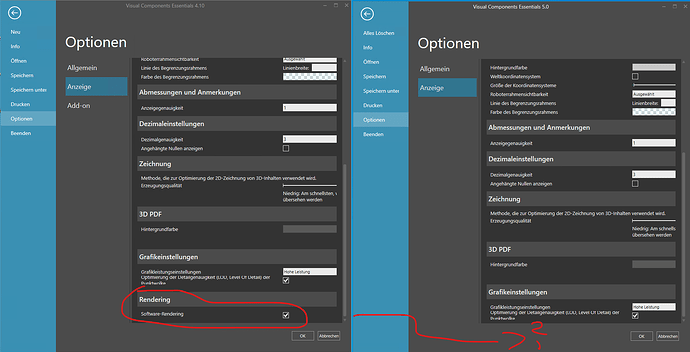
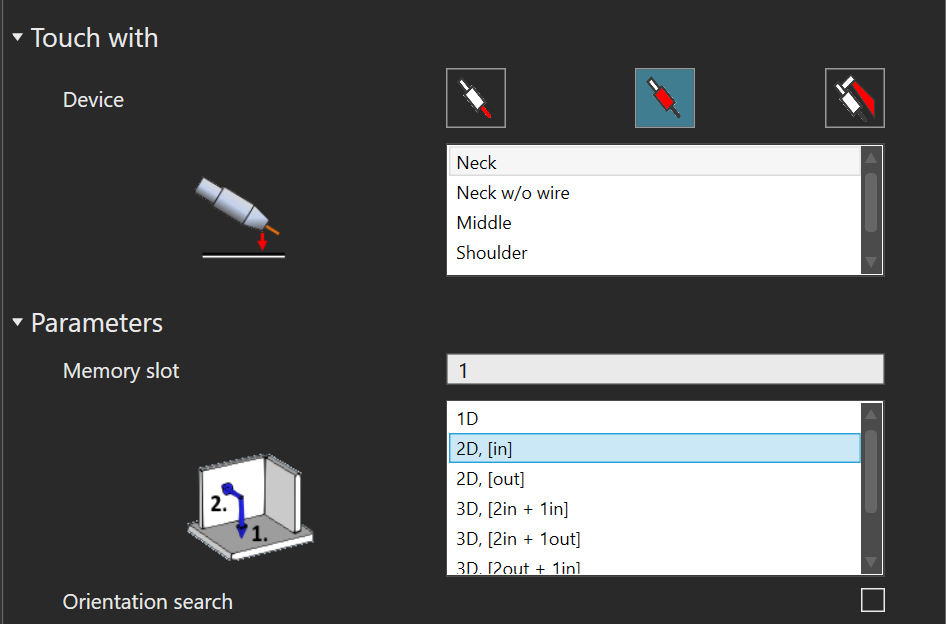
我最近在学习焊接相关的部分,遇到了一个奇怪的问题。在焊接校准过程中有多种方法,但我对“喷嘴接触”这种方式总感觉有些不太放心。
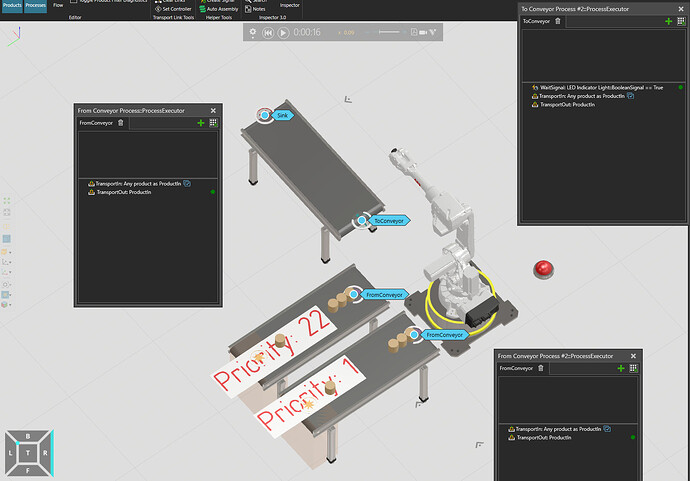
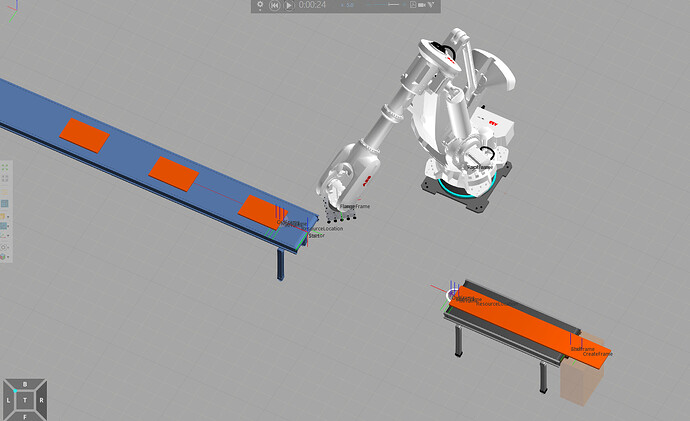
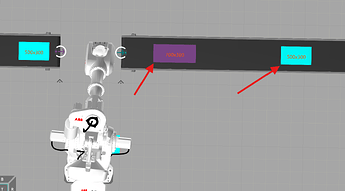
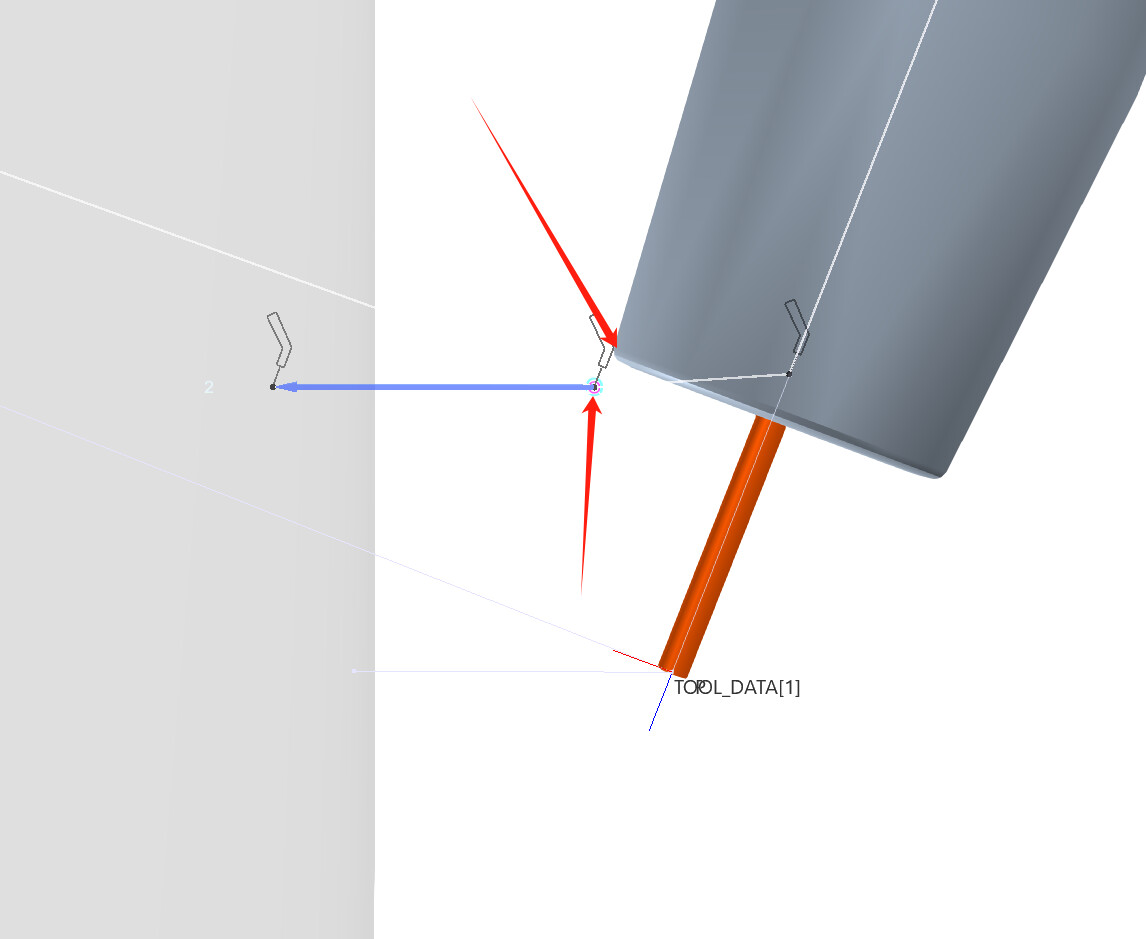
“通常情况下,他会用焊枪的颈部进行触碰寻位,但更多时候我看到他甚至连物体的表面都接触不到,就像这样:”
我尝试了很多次,感觉这种行为是因为 VC 的工具偏移程序只处理坐标系,而不关心何时或如何进行接触。这让我很困惑,因为我之前使用 VC 做过需要碰撞检测的项目,并且我知道 VC 至少在处理三角形表面时能很好地处理碰撞。但为什么这个需要碰撞接触的功能却要使用坐标系呢?
当然,既然它使用坐标系,那肯定是有原因的。但这也导致了一个问题:喷嘴颈部是一个圆形。我该如何确保在不同的姿态下,能够正确校准工具接触(喷嘴颈部接触材料表面)而不会撞到机器上?
BAD 2026年1月13日 凌晨2:24
Mats2 2026年1月14日 上午10:103
BAD你好,
这种情况通常发生在你先设置了工具中心点(TCP),然后修改了焊枪几何参数之后。可能是因为有人调整了焊丝长度并更新了几何数据,导致TCP位置保持不变,但焊丝伸出长度比以前更长了。
要解决这个问题,可以尝试重置TCP——只需将其重新设置到焊丝尖端即可。
如果问题仍然存在,请告诉我。
Mats2你好!
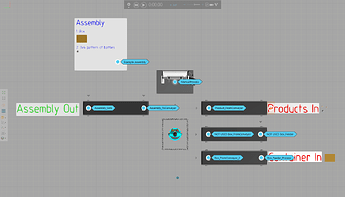
这只是我临时搭建的一个演示环境,全部使用VC内置模型,包括机器人是库卡KR210 R2700,焊枪也是机器人工具库里的默认焊枪。
那么,我需要一份包含这些参数的手册才能使用VC的搜索模块吗?或者说,这是VC搜索模块实现精确性的唯一途径?如果是非标准焊枪又该怎么处理呢?
Mats2 2026年1月14日 下午12:385
BAD你好,
这个工具似乎有些问题。我测试了一下,使用工具自带的TCP时得到了相同的结果。但当我使用机器人属性中的第一个工具,并将TCP设置为该工具时,它立刻就能正常工作。
我会反馈这个问题,以便未来能正确修复。
---
好的,Mats2,感谢您的及时回复!
那么如果我后续使用自己的模型,需要注意哪些方面?根据您所说的,似乎建模层级稍有偏差就会导致功能异常,但我在手册中没有看到相关说明。
I will report this so it should work correctly in the future.
1 Like
BAD January 14, 2026, 1:57pm6
你提出的这个问题很关键。手册里没写,很可能是因为这类问题通常出现在模型开发与调试的“细节地带”,而这往往是通用手册难以覆盖的。根据论坛上的信息,当你使用自己的模型时,确实需要特别注意建模层级和TCP(工具中心点)的设置方式。
🏗️ 关键建模原则:理解“姿态”与“层级”
你之前遇到问题时,感觉“VC的工具偏移程序只处理坐标系”,这个直觉很准确。其背后的原理是,Search模块在执行触碰时,依赖的正是机器人、工具和工件这三者在正确层级关系下所确立的坐标系。
🔧 排查与修正:具体应关注哪些细节?
基于这个原则,你可以从以下几个方面着手检查和优化你的模型:
-
检查TCP的基准点:
-
检查模型层级与坐标系:
-
确认你自定义的焊枪工具是一个独立的、完整的Component(组件)。
-
检查这个组件的Root(根坐标系)位置是否合理,并确保其下的所有子模型(喷嘴、焊丝等)都正确地挂载在Root坐标系下,形成了清晰的父子关系。
-
一个清晰的层级可以确保每个部件的局部坐标都能准确无误地转换到世界坐标系中。
-
检查碰撞检测相关的几何体:
-
核对“喷嘴接触”的相关参数:
-
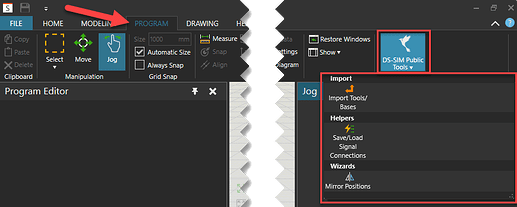
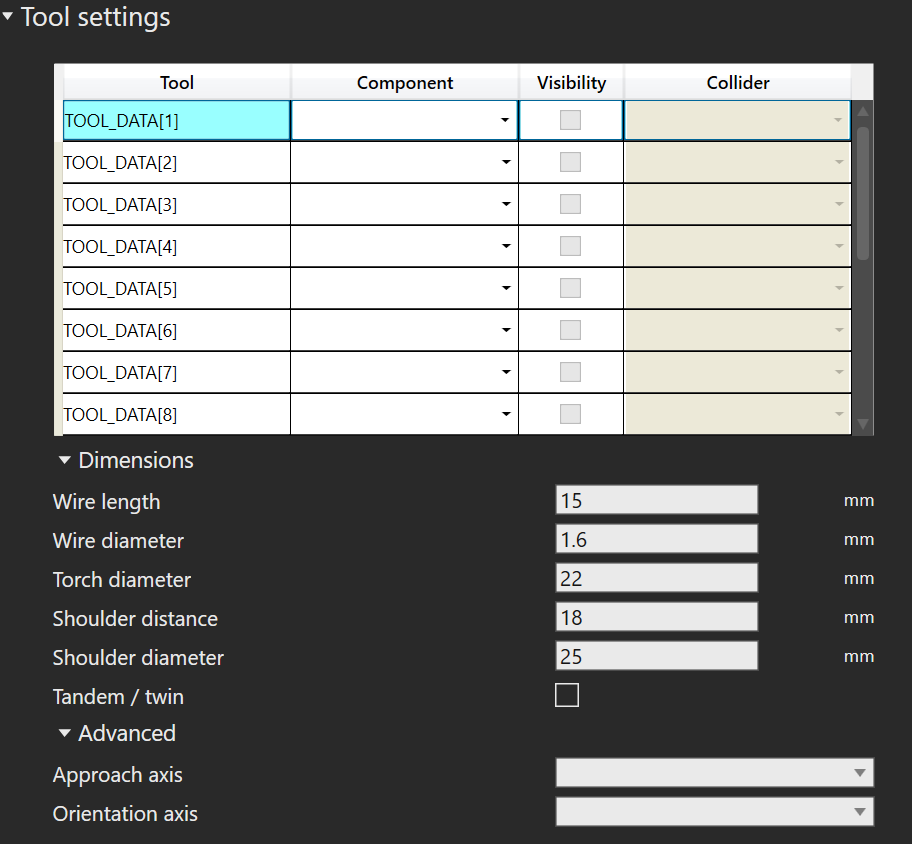
在OLP编程的Setup选项卡中,找到Tool settings或Dimensions区域。
-
在这里,你需要将自定义焊枪喷嘴的关键尺寸填入相应的字段,例如:
-
a = Wire length from gas nozzle: 焊丝从气体喷嘴伸出的长度。
-
b = Wire diameter: 焊丝的直径。
-
c = Torch diameter: 焊枪喷嘴的直径。
-
d = Shoulder distance, e = Shoulder diameter: 喷嘴肩部的相关距离和直径。
-
这些参数是Search模块进行精确运动学计算的基础,确保它们与实际模型和物理属性相符至关重要。
.


 微信扫一扫,打赏作者吧~
微信扫一扫,打赏作者吧~