小型四足机器狗开源代码和模型
2021-08-12
新闻来源:网淘吧
围观:1314
电脑广告
手机广告

在波士顿动力的Spot之后,四足机器狗变得非常流行。 之前社区也分享过用树莓派做的四足机器人Pupper——《能跑能跳能遛弯儿,波士顿动力Spot的小跟班来了!项目开源!》 用Arduino Uno做的Pupper的小弟——《可扩展性高,四足机器人斯坦福Pupper的小弟来了!》 今天分享的是利用ESP32制作的小型四足机器狗。 特点
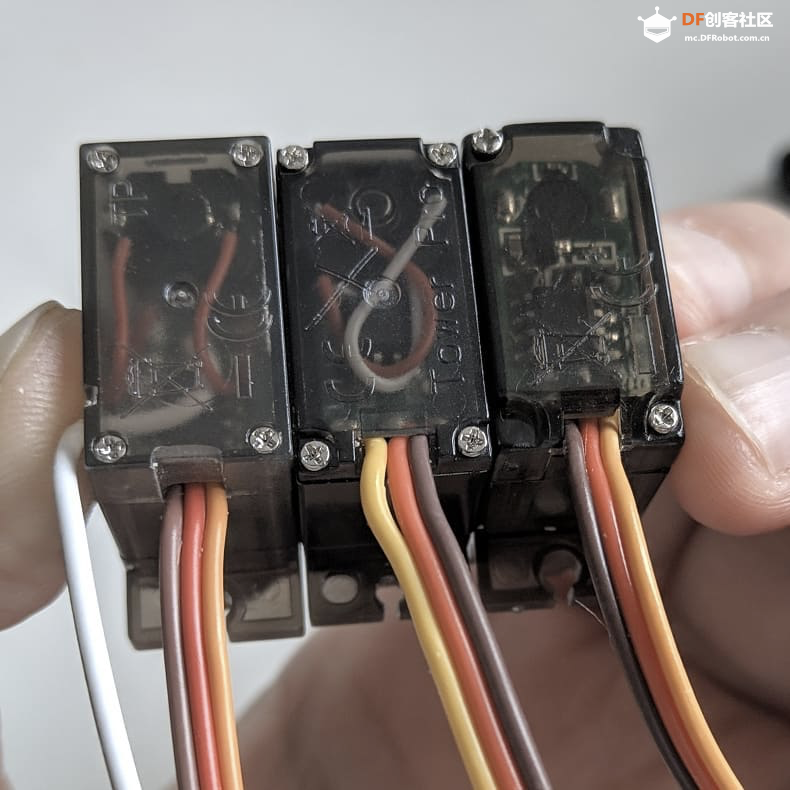
电子部分
其他
打印部件 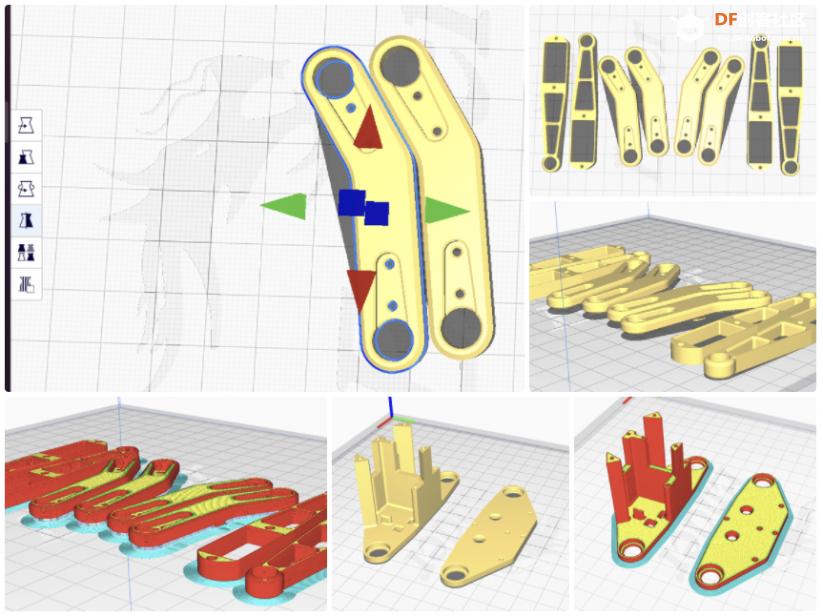 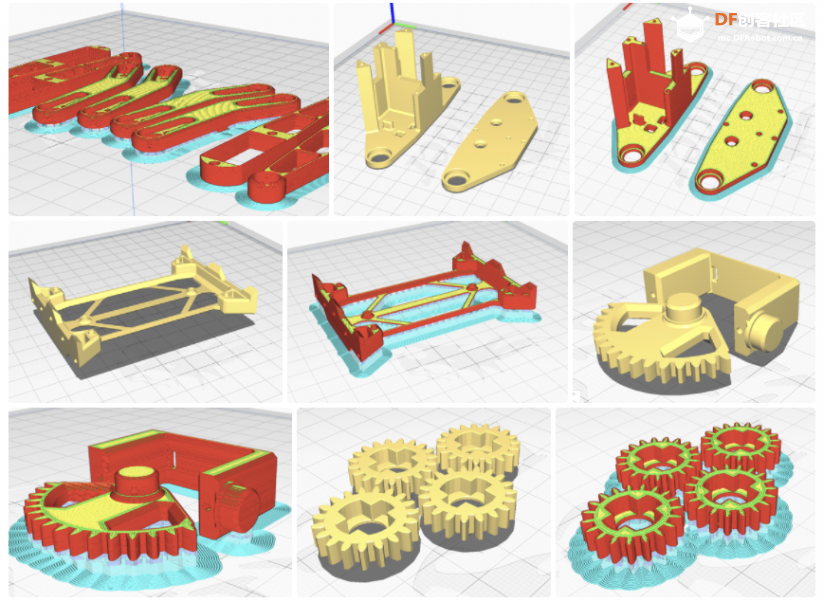 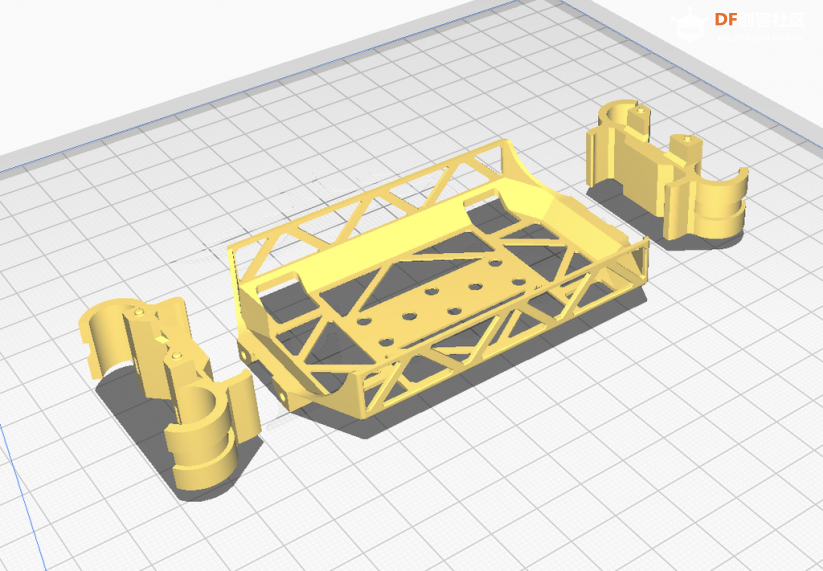 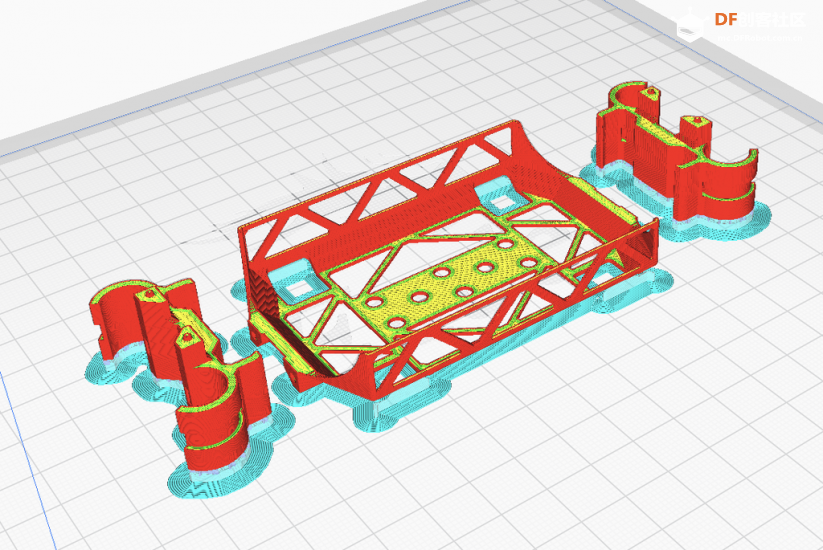 所有要打印的STL文件可以在文末下载。 有些部分是镜像的,为了保证能够正确打印。请注意观察图片。 我的打印机在第一层厚度上有问题,也就是象脚。齿轮应该被尽可能完美地打印出来,所以我添加了非常小的垫片来避免这个问题,你会看到一些部件 "飞 "过表面,记得启用对它的支持。 强烈建议大家用最好质量的打印零件,特别是齿轮部分。 要打印的零件的完整清单:
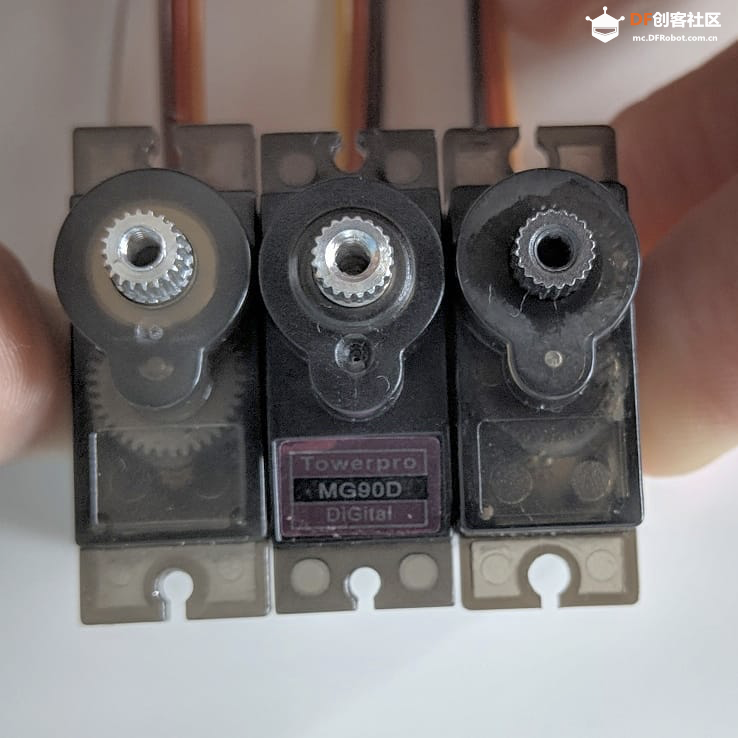
我使用Ender 3 Pro,Cura,使用支持并选择动态质量。塑料是OPY的PLA。 可以在https://www.thingiverse.com/thing:4822059 或者在文末下载。 组装  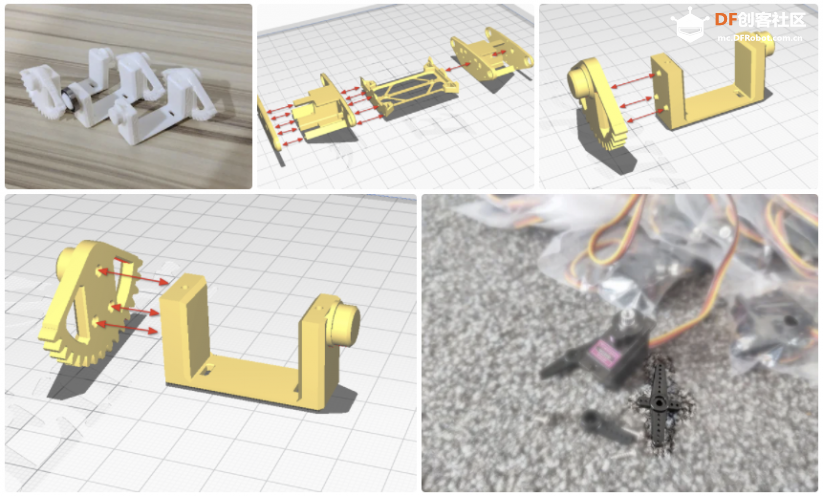 准备工作 在开始之前,检查轴承是否可以很容易地安装在机体部件和肩部部件上。 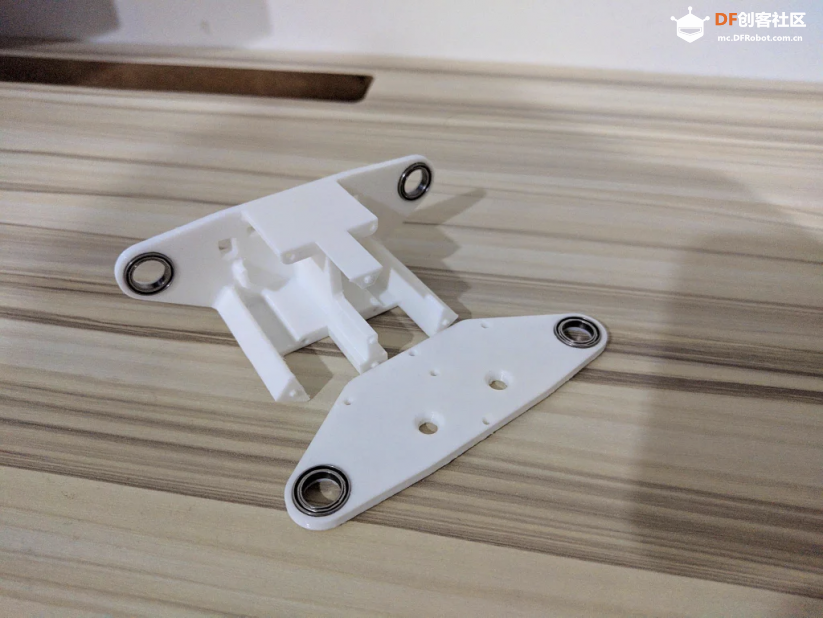 还要检查肩部和车身部件上的孔是否打印得很好,伺服杜邦线(临时拆卸的伺服连接器)是否可以装在里面。  开始组装 我试图使机身尽可能的轻,因为小舵机不是很强大。 确保胶合面是平的,这边可以用一下锉刀。确保部件之间相互连接,没有空隙。 然后如上图所示把他们粘在一起。 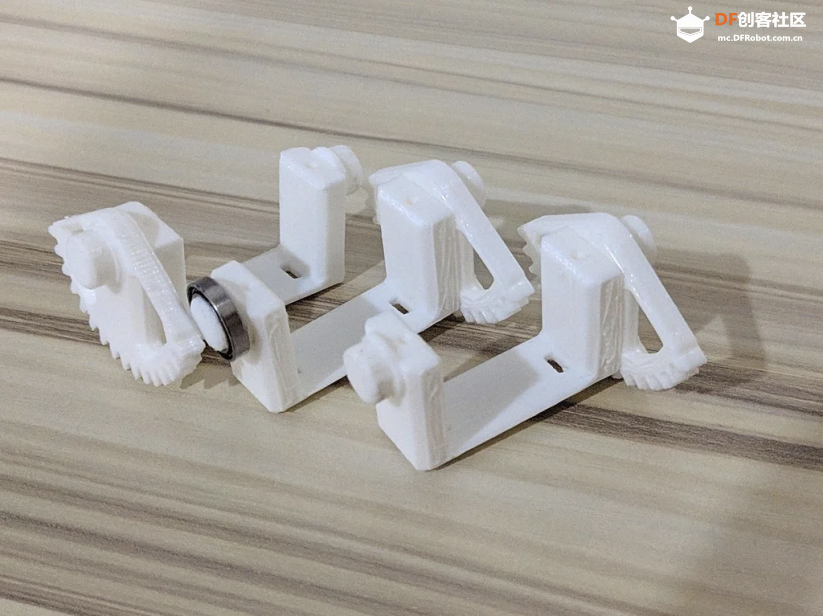 舵机齿轮 切断舵机角(见图),使它适合舵机齿轮的部分,并把它们粘到一起。 腿部  将短的舵机角粘在 "腿顶 "部分。 将舵机插入 "腿部底部",如图所示插入杜邦线。 将另一条伺服电机的杜邦线穿过 "肩 "部的一个孔。 重复上述步骤。 把机身和腿组装在一起 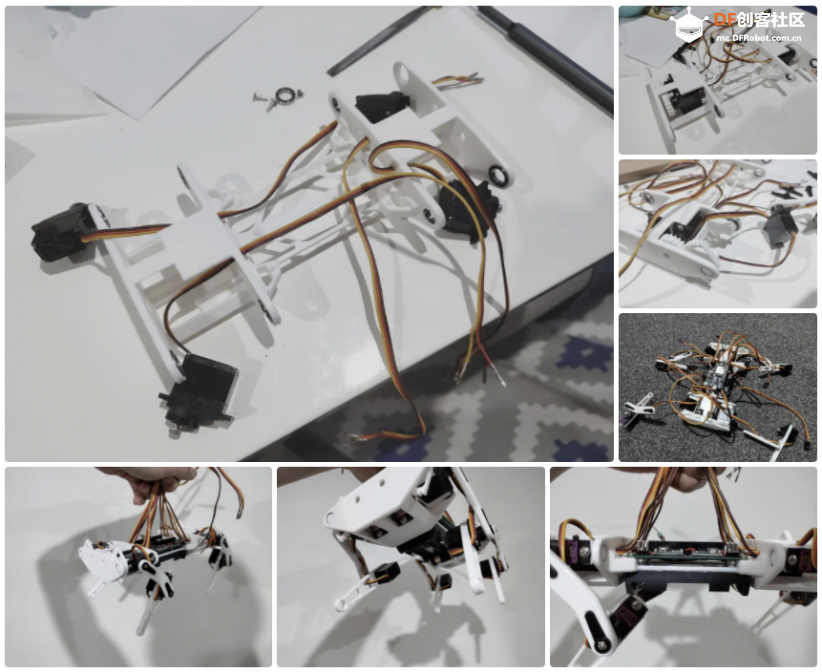 如之前的图片所示,将所有杜邦线穿过腿部和机身的孔。 用Arduino/ESP32或舵机测试仪将所有舵机调到中间位置。 将 "舵机齿轮 "安装在舵机上,并将舵机插入机身。想要拧紧它可能是个挑战。 挤压没有舵机的 "肩膀 "部分(但有杜邦线),将其插入轴承之间。 重复其他舵机和部件的操作。 这个时候,我们不需要用螺栓固定腿部,等会儿我们需要按照我的GitHub资源库中的说明校准腿部: https://github.com/SovGVD/esp32-robot-dog-code PCB部分 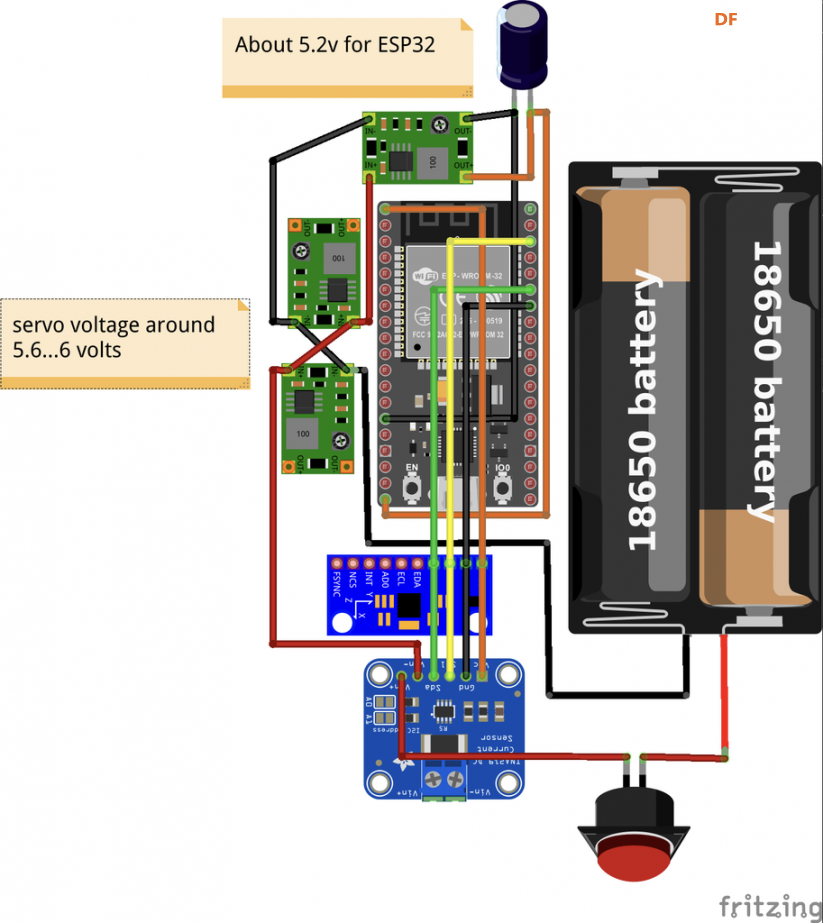 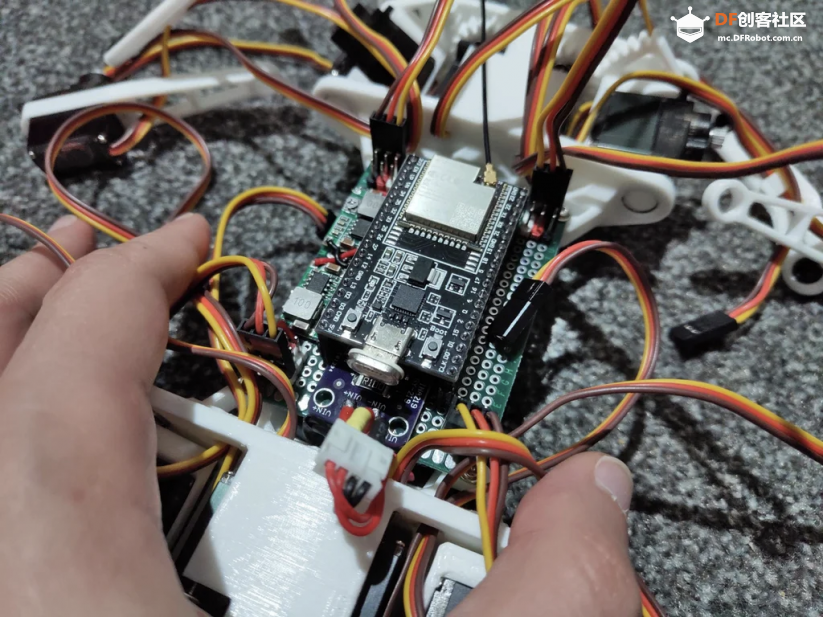 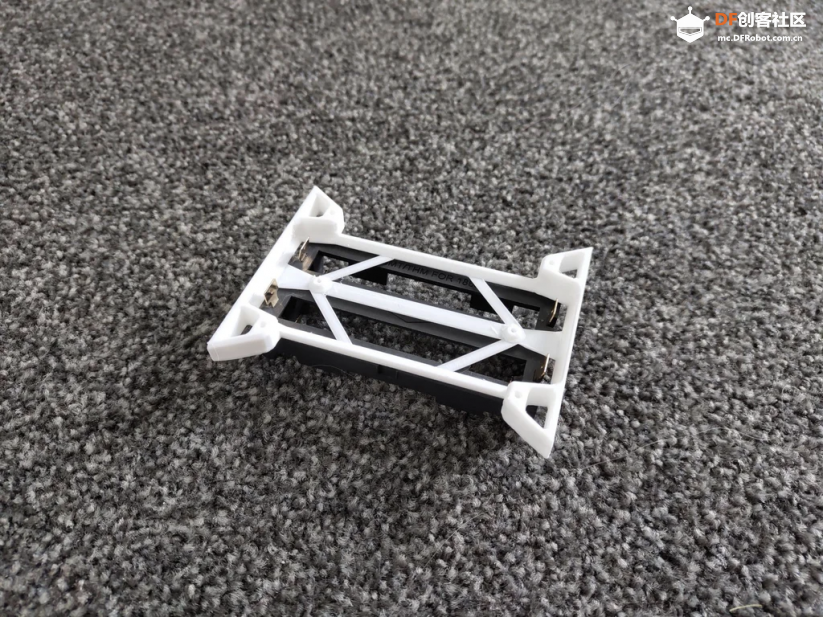 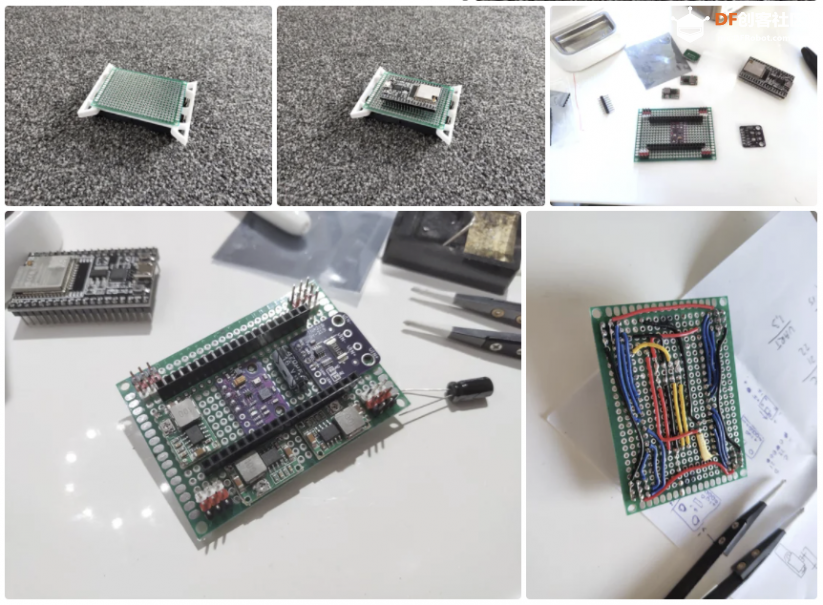 PCB的配置由你决定。下面只展示我的做法。 传感器连接到ESP32的默认I2C总线(GPIO 21和22)。 舵机连接到:
你可以在代码中重新配置,但要确保ESP32 ISR库支持。 代码 在Arduino IDE上安装额外的库:
设置WiFi接入点凭证。
打开浏览器,输入网址http://192.168.4.1/,你会看到两个虚拟摇杆来控制机器狗。 希望大家能够喜欢。 项目作者: Gleb Devyatkin
转自DF创客社区
|


 微信扫一扫,打赏作者吧~
微信扫一扫,打赏作者吧~文章底部电脑广告
手机广告位-内容正文底部
上一篇:ROS学习书籍免费下载
下一篇:多足动物步态分析